CW32电机控制基础——无刷直流电机转速单闭环控制介绍
电源电压波动、负载变化等都会引起转速的改变,采用转速负反馈控制能够有效地抑制稳态时转速波动,但因电枢电流不受控,系统的动态性能欠佳。BLDCM转速单闭环调速系统框图见图1。
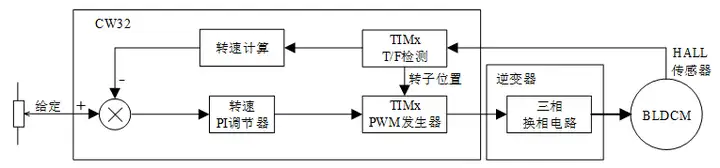
图1 BLDCM转速单闭环调速系统
一、转速信号的采集和处理
转速测量是调速系统中构成转速负反馈的最基本条件,无刷直流电机转子位置检测信号属脉冲信号,其变化的快慢直接由转轴转速决定,因此可用以转速的测量。常见基于脉冲的转速测量方法有以下三种:
1.M法测速
通过对规定时间内位置检测信号的脉冲个数进行计数来获得被测转速,称为M法测速。转速较低时因测量时间内的脉冲数少,误差会变大,所以M法宜测量高速。如要降低测量的转速下限,可以提高编码器分辨率或延长测量时间,使一次采集的脉冲数尽可能多。
2.T法测速
测量相邻两个位置检测信号的时间来测量转速,称为T法测速。转速较高时,因测得的周期较小,误差因此变大,所以T法宜测量低速。如要增加转速测量的上限,可以减小编码器的脉冲数,或使用更小更精确的计时单位,使一次测量的时间值尽可能大。
3.M/T法测速
M法、T法各有优劣和适应范围,同时受成本和实时性等条件限制,全转速范围内的测量通常使用M法、T法结合的M/T测速法,即同时检测时间和在此时间内脉冲发生器发出的脉冲个数来测量转速,低速时测周期、高速时测频率,但需综合各方面因素确定转速测量方法的切换点,对系统软硬件要求较高。
二、电机启动及转速调节策略
由根据前面分享的《CW32电机控制基础--无刷直流电机的运行特性》可知,如果启动策略欠妥,可能导致远超出正常电流的启动电流,以致损坏硬件电路;也可能因启动电流小导致电磁转矩偏低,电机启动困难,启动时间长等问题。
在无刷直流电机转速单闭环调速系统中,电枢电流通常也不可测,为保证系统的可靠运行,电机通常空载或轻载启动,PWM占空比从一个较小的足以克服负载转矩的值开始逐渐上升,直至达到设定转速。然后,控制系统才转换到正常的转速闭环控制。PWM占空比的缓慢提升相当于缓慢增加施加于电机电枢电压,从而使起动电流被限制在一个合适的水平,50至几百ms的软起动时间一般足以限制起动电流的冲击。
以驱动风机为例,电机PWM方式启动过程可分为三个过程:
1.转子定位:视负载大小选择启动转矩,再由式(1)计算电枢电压从而确定启动PWM占空比,换相电路输出特定相电压,直到转子旋转到特定位置;
2.斜坡升速:换相电路根据检测到的位置信号开始换相,并开始转速测量;根据实测转速推算负载转矩,结合要求的升速时间经式(4)确定所需电磁转矩,再由式(3)计算对应的电枢电流,最后通过式(1)和式(2)计算新占空比值并输出,如此重复直至启动过程结束;
3.正常运行:系统进入闭环运行状态,占空比由转速PID运算确定。
总之,转速单闭环系统具有系统简单、成本低廉等优点,但因电流不可控,系统动态性能欠佳,不适用于有频繁启停要求的应用场合。
电动势平衡方程式为:
电枢反电动势:

电磁转矩Te:
电枢电流(起动电流):

审核编辑 黄宇
- 魏牌V9X上市期待这么久终于上市了,34.98万元起!
- 苏宁易购拟1元底价“甩卖”家乐福中国主体:持续推进非主营业务瘦身
- 浙商策略:双创冲高回落大盘调整 短线或震荡、中线暂无忧
- 全线跳水!超15万人爆仓!霍尔木兹海峡,大消息
- 韩国股市重挫 启动卖方“熔断机制”!
- 注意风险!5月以来超110只ST股下跌 3股已腰斩
- 单笔订单总额超全年营收!一字涨停后,华秦科技回应:今年干不完
- 稀缺!高研发+高成长的优质次新股 仅10只(附名单)
- 335亿元市值上市公司 第六大股东是演员张凌赫?公开信息显示非同一人 公司回应
- 国信策略:A股日历效应还有效吗?
- 云南锗业十倍股 磷化铟概念龙头爆发(附名单)
- 一家精神病院炒股成前十大股东 力压高盛 曾套现273万元 当地回应
- 【风口研报】国内首个大规模算电协同绿电项目投运 绿电板块有望迎增长新纪元
- 官司打赢了,钱却没到账?永辉超市亏损25亿元后又陷36亿元追债困局
- 东阳光拿到金额最高190亿算力大单 东莞首富抢占AI产业风口
- 五家上市险企一季度新业务价值普涨 是否已进入新一轮修复周期?