AGV机器人如何精准识别库位有无货物?
在现代智能仓储系统中,AGV(自动导引车)机器人已成为提升效率、降低成本的“明星设备”。它们能自主导航、搬运货物,实现仓库的无人化操作。但AGV如何精准判断库位是否有货?这背后隐藏着哪些黑科技?本文将为您揭秘AGV识别库位状态的三大核心技术。
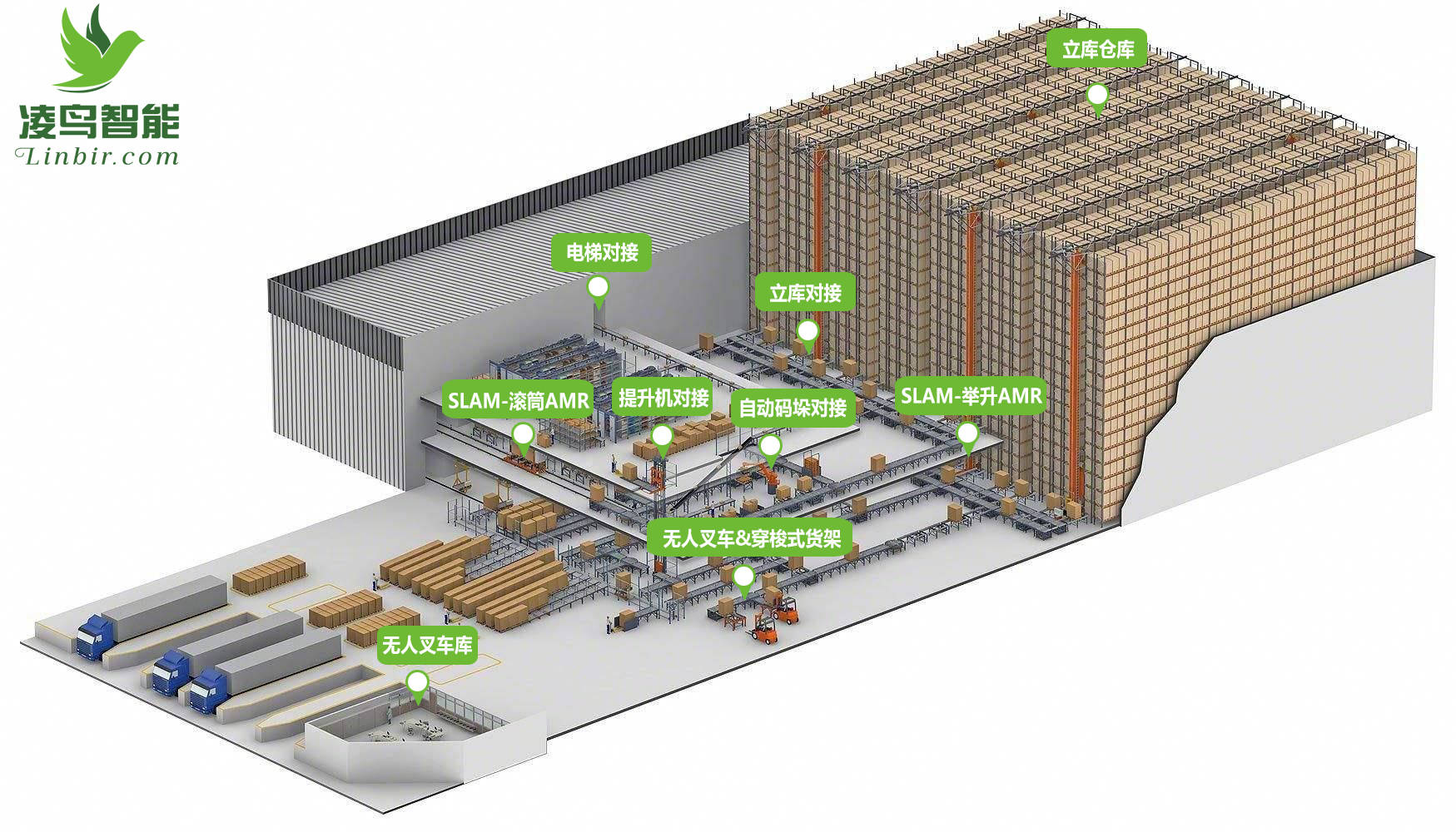 AGV智能无人仓
AGV智能无人仓
一、激光传感器:AGV的“精准测距仪”
激光传感器是AGV识别库位状态的核心设备之一。它通过发射激光束并接收反射光,利用激光的传播时间和角度,精确测量库位与AGV的距离和相对位置。当AGV靠近库位时,激光传感器会快速扫描库位区域,检测是否有障碍物反射信号。
空库位识别:若库位为空,激光束会直接穿透或反射微弱,传感器接收到的信号强度较低,AGV据此判断库位未被占用。
有货库位识别:当货物存在时,货物表面会反射激光,传感器接收到较强的反射信号。通过分析反射光的模式(如强度、角度变化),AGV可判断货物的大小、形状和位置,从而确认库位状态。
激光传感器的优势在于其高精度和快速响应能力,即使在复杂的光照条件下,也能稳定工作。然而,它对透明或反光货物的识别可能存在挑战,需结合其他技术进行优化。
AGV小车
二、视觉识别技术:AGV的“智能摄像头”
视觉识别技术为AGV提供了更丰富的环境感知能力。配备高清摄像头的AGV会对库位进行图像采集,利用图像处理和机器学习算法,分析图像中的货物特征。
图像特征学习:系统会提前学习有货和无货库位的图像特征(如颜色、纹理、形状等),通过深度学习模型训练,使AGV能够自动识别库位状态。
实时识别与调整:面对新的库位图像,AGV会快速比对预存特征,判断是否有货物存在。同时,视觉系统还能识别货物的摆放姿态,为后续的搬运操作提供指导。
视觉识别技术的优势在于其强大的信息处理能力和适应性,能够识别各种类型的货物。但它在光线不足或货物遮挡严重的情况下可能表现不佳,需结合激光传感器或压力传感器进行互补。
 AGV叉车
AGV叉车
三、压力传感器:AGV的“重量感知器”
压力传感器是另一种直接有效的识别方法。在库位安装压力传感器后,当货物放置在库位上时,传感器会检测到重量变化,并将信号传输给AGV。
重量变化检测:压力传感器通过测量库位的承重变化,判断是否有货物存在。这种方法的准确性较高,且不受货物材质和形状的影响。
信号传输与处理:AGV接收到压力传感器的信号后,会立即处理并更新库位状态信息,确保搬运操作的准确性。
压力传感器的优势在于其简单性和可靠性,特别适用于对重量变化敏感的库位。然而,它可能无法识别轻量或非承重型的货物,需结合其他技术进行综合判断。
无人AGV
在实际应用中,AGV通常会综合运用激光传感器、视觉识别技术和压力传感器,以提高识别准确性和可靠性。这种多技术融合的方式,使AGV能够在各种复杂环境下稳定工作,为智能仓储系统提供强大的支持。
随着技术的不断进步,AGV识别库位状态的能力将进一步提升。未来,我们可能会看到更多创新技术的应用,如3D视觉识别、AI深度学习等,为AGV赋予更强大的“火眼金睛”,推动智能仓储向更高水平发展。
审核编辑 黄宇
- 为什么换电模式能降低电池使用门槛?
- 能装能扛油耗省,祥菱V5微卡俘获建材运输郑老板
- 小米澎程长滑轨耐用性如何?日常进灰好不好清理? 官方回应
- 车企出海如何放大市场盈利空间?
- 新能源车智驾系统怎样影响投资?
- 汽车电池研发投入大的环节有机会吗?
- 小鹏X9空气悬架“趴窝”,引发全行业反思!零部件供应商:车企非常卷,追求新技术快速上车,甚至允许边开发边上车
- 车电分离的换电模式有哪些技术瓶颈?
- 如何布局新能源车产业链投资组合?
- 乐道L60交付破10万台,李斌:智驾能与特斯拉掰手腕
- 小米李肖爽:澎程系列增程器7个核心零部件全部重新选型、重点开发
- 预售18.99万起 新款星途ES将7月20日上市 智能化/动力续航升级
- 预售29.98万起 北汽泰钽700开启预售 中大型硬派SUV/1.5T增程混动
- 腾势Z续航信息曝光 提供多种续航可选
- 智己LS9 Hyper上市:37.98万元配三电机,纯电续航390公里
- 广汽迎来3000万用户里程碑时刻